


















Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

Shenzhen Kingsom Technology Co., Ltd.
Marke: Kingsom
Verpakung: Karton aus Holz
Produktivität: 1000sets/year
Transport: Ocean,Land
Ort Von Zukunft: Shenzhen
Unterstützung über: Strong
Zertifikate : CE,CCC,ROHS and ISO9001:2008
Hafen: Shenzhen Port
Zahlungsart: L/C,T/T
Incoterm: FOB
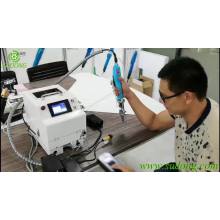
Pick and Place Manipulator 6-Achsen-Industrieroboter Preis
Sechsachsige Industrieroboter haben im Allgemeinen 6 Freiheitsgrade. Übliche sechsachsige Industrieroboter umfassen Rotation (S-Achse), Unterarm (L-Achse), Oberarm (U-Achse), Handgelenksrotation (R-Achse) und Handgelenkschwung (B-Achse) und Handgelenksrotation (T-Achse). Die 6 Gelenke werden kombiniert, um die 6-DOF-Bewegung am Ende zu realisieren. Der sechsachsige Manipulator ist ein Manipulator mit 6 Servomotoren, und der sechsachsige Manipulator ist ein mechanischer Manipulator, der die Drehung und Bewegung der x-, y- und z-Achse zum Betreiben nutzt. Der Roboterarm ist das am weitesten verbreitete automatisierte mechanische Gerät auf dem Gebiet der Robotertechnologie. Es kann in den Bereichen industrielle Fertigung, medizinische Behandlung, Unterhaltungsdienstleistungen, Militär, Halbleiterherstellung und Weltraumforschung gesehen werden. Obwohl ihre Formen unterschiedlich sind, haben sie alle ein gemeinsames Merkmal: Sie können Anweisungen annehmen und einen Punkt im dreidimensionalen (oder zweidimensionalen) Raum für Operationen genau lokalisieren. Zusätzlich zur Robot Arm Machine, unserem Unternehmen hat auch viele Produkte, wie Lötdampfextraktor, Lötpastenspender, pneumatischer Handschraubenförderer, automatischer Schraubenförderer. Wenn Sie diese Produkte benötigen, können Sie uns kontaktieren, wir werden Ihnen so schnell wie möglich antworten.
Kollaborative Funktion
1. Anleitung zum Unterrichten (inverse Kinematik-Bewegungsplanung): Diese manuelle Bedienung des Roboters ermöglicht eine schnelle und einfache Programmierung des Roboters durch Demonstration ohne Programmierkenntnisse.
2. Arbeitet Seite an Seite mit dem menschlichen Bediener ohne Sicherheitszaun, Laser oder Sensoren (nachdem eine Risikobewertung durchgeführt wurde).
3. Die Teach-Pendent-Benutzeroberfläche für die Programmierung (Vorwärtskinematik) ermöglicht die Online-Programmierung und -Simulation über ein Touchscreen-Tablet.
4. Leicht, flexibel und einfach zu verwenden. Dieser Roboter wiegt weniger als 24 kg
Sicherheitsfunktionen
1. Entworfen gemäß den Sicherheitsanforderungen PLd und ISO 10218-1 (5.10.5 Leistungs- und Kraftbegrenzung) und den meisten Spezifikationen für den kollaborativen Roboterbetrieb.
2. Das Design der Kraft- und Kraftbegrenzung bringt den Roboter zum Schutzstopp, wenn die Grenzwerte überschritten werden oder eine Kollision erkannt wird. Geschwindigkeit und Kraft können angepasst werden, um jede Anwendung einfach anzupassen und zu optimieren.
3. In Motorantriebe eingebettete Sensoren geben Echtzeit-Feedback, um gefährliche Situationen zu vermeiden.
4. Die Not-Aus-Taster befinden sich am Teach-Pendant und am Steuerkasten mit einem Bremsweg von weniger als 1 mm.
Open Source-Architektur
1. CAN-Bus-Netzwerk, das in diesem Roboter verwendet wird, damit mehrere Mikrocontroller miteinander kommunizieren können.
2. ROS (Robot Operating System) wird über die API unterstützt.
3. Die Hardware verwendet CAN-Bus-Protokolle mit offenen E / A-Schnittstellenerweiterungen.
4. Integrieren Sie den Roboter einfach in vorhandene Produktionssysteme.
Return on Investment (ROI)
1. Niedrige Betriebskosten, keine Programmierkenntnisse und eine einfache Integration in ein System sorgen für eine schnelle Amortisation Ihrer Investition. Der durchschnittliche ROI beträgt 3 bis 4 Monate.
2. Kurzfristige Jobs in Umgebungen mit hohem Mix wie Laborautomatisierung oder Maschinenpflege sind erstklassige Beispiele für Branchen, die eine schnelle Umschichtung benötigen.
3. Die Stellfläche kostet in den meisten Unternehmen in der Regel mehr als die Ausrüstung. Ein leichter Roboter mit geringem Platzbedarf ist ein großer Vorteil für die Produktionskosten von Unternehmen jeder Größe.
4. Anwendungen mit demselben Roboter neu verwenden, neu bereitstellen und / oder neu erfinden, die Anzahl der Freiheitsgrade ändern, Gelenke und Rohre sind modular aufgebaut, sodass sie leicht repariert und neu konfiguriert werden können.
Technische Spezifikationen
| Controlled Axed DoF | 6 axes (J1, J2, J3, J4, J5, J6) J7max |
| Reach | 924 mm |
| Working Range | 880 mm |
| Payload | 5kg |
| Weight | 24kg |
| Footprint | 172 mm diameter |
| Collabortative Operation |
Safety-rated monitored stop, and guiding, speed and separation monitoring, power and force limiting |
| Certifications | ISO 10218-1:2011, EN 60204-1:2006 +A1:2009 |
| ISO 12100:2010, ISO 13849-1:2008, CE | |
| Repeatability | ±0.02mm |
| Linear Velocity | 2.8 m/s adjustable |
| Power Consumption | 200 watts typical application |
| Materials | Aluminum, Steel, Plastic |
| Ambient Humidity | Normal 75% RH or less without frost, or dew, 85% RH short term |
| Ambient Temperature | 0 to 45 degrees Celsius |
| IP Classification of Robot | IP 54 |
| Programing |
Teach Pendant with user interface, guide to teach, ROS compatibility through an API, Lua, Python |
| Communication | CAN Bus |
| Motor Type | Harmonic drive 48 Volt |
| Installation Orientation | Any celling, Floor, Wall |




| Axis | Working Range | MAximun Speed | Max Joint Moments |
| J1 axis rotation base | (+/-)175° | 150°/sec | 207Nm |
| J2 axis rotation shoulder | (+/-)175° | 150°/sec | 207Nm |
| J3 axis rotation elbow | (+/-)175° | 150°/sec | 207Nm |
| J4 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |
| J5 axis wrist swing | (+/-)175° | 180°/sec | 34Nm |
| J6 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |
Kontrollkasten

| Dimensions (LxWxH) | 683x220x622 mm | I/O Ports | GENERAL I/O | ||
| Weight | 20kg | Digital in | 16 | 16 | |
| Cabling | 5m | Digital Out | 16 | 16 | |
| Colour | Black | Analog in | 4 | ||
| Communication | TCP/IP, Modbus-RTU/TCP | ||||
| Power supply | 100-240 VAC, 50-60Hz | ||||
| IP Classification | IP54 |
| I/O PORTS | GENERAL I/O | SAFETY I/O |
| Digital in | 16 | 16 |
| Digital Out | 16 | 16 |
| Analog in | 4 |




1. Ihre Anfrage zu unseren Produkten oder Preisen wird innerhalb von 24 Stunden beantwortet.
2. Gut ausgebildete und erfahrene Mitarbeiter, die alle Ihre Anfragen in fließendem Englisch beantworten
3. OEM & ODM
4. Gute Qualität Papierkarton & Karton Verpackung
5. Vor dem Versand überprüfen
6. Sichere Versandmethode wie DHL / EMS / FEDEX / TNT / UPS
7. Seefracht- oder Speditionsdienst
8. Eine Musterbestellung in kleinen Mengen ist zulässig
Für detailliertere Informationen oder einen Katalog kontaktieren Sie uns bitte!

Produktgruppe : Roboterarmmaschine > Kingsom Neues Produkt Intelligente 6-Achsen-Roboterlackiermaschine












Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.